"... and no one shall work for money, and no one shall work for fame; But each for the joy of the working, and each, in his separate star, shall draw the thing as he sees it, for the god of things as they are"
-Kipling
-Kipling
FPath is a project to explore the possibilities of the Feynman Path to Nanotechnology. Essentially this means using tools to make small tools which then make smaller tools. See the main FPath Project page for more details.
The target goal of this experiment is:
This experiment documents how the FPath project has achieved sub-millimeter movement using Cheap Off The Shelf (COTS) actuators as an X Y stage and closed loop feedback to compensate for the appalling amount of backlash and slop these components display. The associated video shows an enlarged view of a segment of NiChrome wire which forms the tool being moved about. This wire is 0.1 of a millimeter in diameter – a nominal 100 microns or approximately the width of a human hair.
The experiment successfully demonstrated the use of manual keyboard commands to move the target toolhead to within a positional accuracy of about 10 microns or so. A software auto-assist mode was also developed to move the toolhead in an automated way. Further enhancements demonstrated path following behaviours.
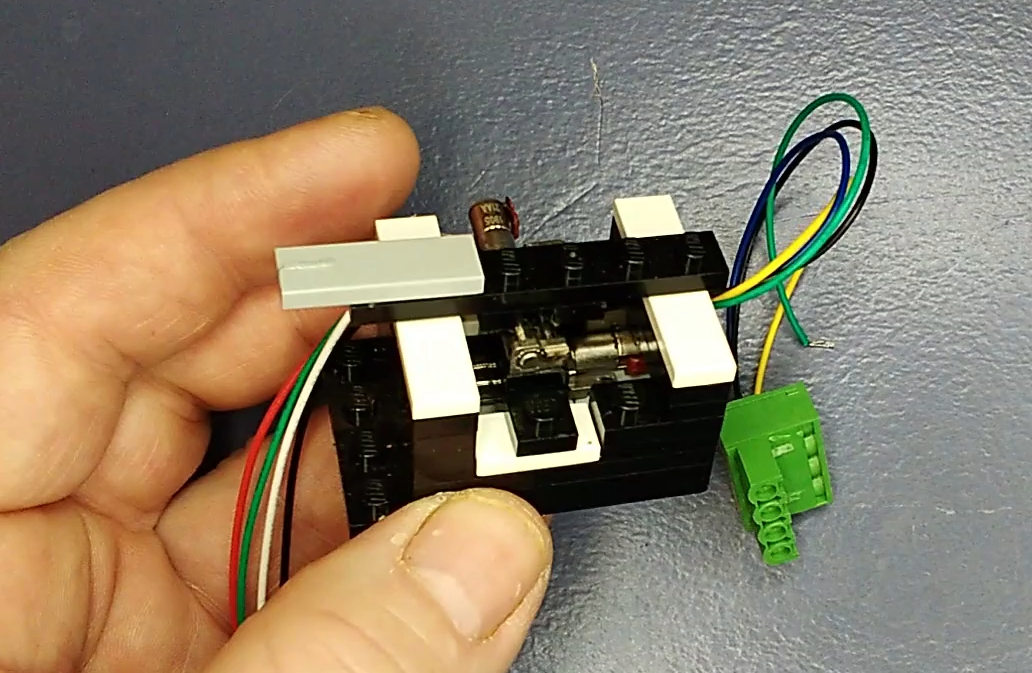
The background to the build of the stepper motor driven sub-millimeter COTS 2D stage and the various movement and path following modes are fully documents in this experiments video.
Fairly significant changes were made to the Walnut software and this software has been released to the GitHub repo as version 00.02.11 and Commit ID 345621e.
The experiment was successful. This experiment constructs a stepper motor driven 2D submillimeter stage out of inexpensive small linear actuators and LEGO bricks. The 2D Actuator developed for this experiment combined with the modifications to the Walnut server software ensured that a tool (represented by a 100 micron wire) can be reasonably moved about in 2D motion to an accuracy of about 10 microns or so.
This experiment was also discussed in a post on the RepRap Blog: SubMillimeter 2D
This experiment is now complete.
The intellectual property rights to all new and/or original ideas and technologies documented under the FPath project and sub-projects are claimed in full by the author and are immediately released into the public domain under the terms of the MIT License. Any ideas, techniques, processes or methods of work documented in the FPath project and sub-projects must be considered to be prior art and must be cited in any patent applications.
The contents of the FPath project and sub-projects are provided "as is" without any warranty of any kind and without any claim to accuracy. Please be aware that the information provided may be out-of-date, incomplete, erroneous or simply unsuitable for your purposes. Any use you make of the information is entirely at your discretion and any consequences of that use are entirely your responsibility.