"... and no one shall work for money, and no one shall work for fame; But each for the joy of the working, and each, in his separate star, shall draw the thing as he sees it, for the god of things as they are"
-Kipling
-Kipling
FPath is a project to explore the possibilities of the Feynman Path to Nanotechnology. Essentially this means using tools to make small tools which then make smaller tools. See the main FPath Project page for more details.
The target goal of this experiment is to:
Demonstrate that the use of small, common off the shelf (COTS), stepper motor driven linear actuators can form a viable positioning mechanism down to about the 50 micron level - if closed loop feedback is used. This experiment also demonstrates the usage of image recognition techniques to automatically control the movement of a toolhead at the 10 to 100 micron scales. A discussion of the pros, cons and usage considerations of small stepper motors is also presented.
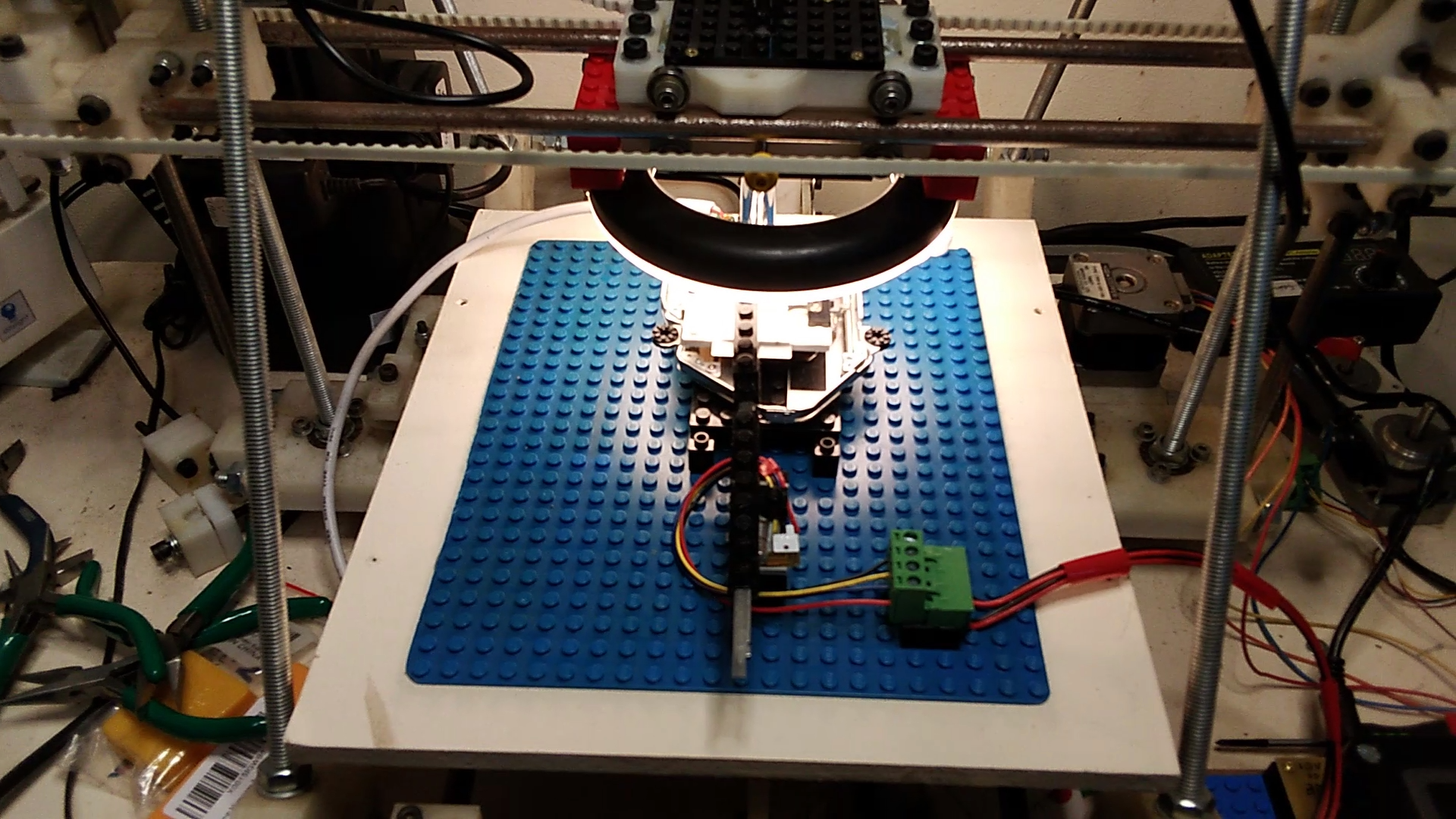
For the purposes of demonstration, experimental apparatus was put together using a sled salvaged from an old DVD drive and two other extremely inexpensive and commonly available stepper driven linear actuators. In keeping with the usual FPath experimental apparatus setup, each stepper motor under test was fitted out with LEGO blocks to simplify their mounting. The drive electronics were composed of a Steggo Electronics Module chain.
Fairly significant changes were made to the Walnut software and this software has been released to the GitHub repo as version 00.02.09 and Commit ID 38341fb.
Below is a specific list of the steps involved in reaching the goal. All of these steps are discussed in considerably more detail in the video which documents this experiment.
The experiment was successful. It was demonstrated that closed loop control can drive even very imprecise stepper motor driven micro linear actuators to a precision of around 50 microns.
This experiment was also discussed in a post on the RepRap Blog: Borrowed Precision
This experiment is now complete.
The intellectual property rights to all new and/or original ideas and technologies documented under the FPath project and sub-projects are claimed in full by the author and are immediately released into the public domain under the terms of the MIT License. Any ideas, techniques, processes or methods of work documented in the FPath project and sub-projects must be considered to be prior art and must be cited in any patent applications.
The contents of the FPath project and sub-projects are provided "as is" without any warranty of any kind and without any claim to accuracy. Please be aware that the information provided may be out-of-date, incomplete, erroneous or simply unsuitable for your purposes. Any use you make of the information is entirely at your discretion and any consequences of that use are entirely your responsibility.